The gimbal is a suspension device in which a body is mounted so that it can rotate in all directions in space. In most cases, the gimbal consists of three rings whose axes are offset by 90° and can be rotated in one another. Gimbals are often used in aerospace and stellite communications. For tactical airborne gimbal systems, the cogging-free ThinGap motor sets of the LSI-Series are particularly suitable.
The use of airborne gimbals is widespread in both manned aircraft and unmanned aerial vehicles (UAVs). In addition to their common use in communications systems, they are increasingly being used in law enforcement security systems, search and rescue operations, and in support of Coast Guard severe weather and offshore operations. The use of gimbals has become a critical component of defense agencies' Intelligence, Surveillance and Reconnaissance (ISR) objectives. These state-of-the-art gimbals, or "balls" as they are often called, are often equipped with advanced sensor payloads such as thermal imagers, high-precision cameras, air-to-ground communications, and lasers for pointing, ranging, and illumination.
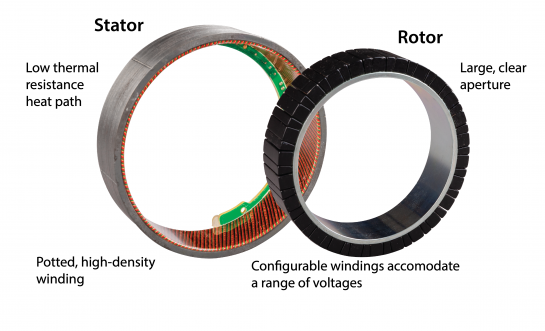
Multiaxial gimbals require high-power motors to directly drive their movements and maintain position. As airborne systems, high performance is defined by weight, torque capacity, smooth motion and a desirable form factor. The LSI Series slotless motor kits meet all of these critical requirements.
The patented method of distributing the motor phase coil wires with a very thin cross-section eliminates traditional magnetic stator teeth, resulting in a motor without cogging. Cogging is an undesirable magnetic torque disturbance that occurs in most motors. The main cause of cogging is in the winding patterns of the stator, which must fit into the slots between the traditional iron teeth (or poles), hence the term slotless. Slotless motors eliminate cogging torque and provide smooth motion, which is critical for optical systems for precise aiming, pointing and zooming at long distances, and otherwise for smooth motion for accurate scanning. LSI Series motors also have phase symmetry with less than 1% harmonic distortion, allowing the motors to produce smooth motion.
With very thin wire-wound stators and optimized permanent magnet rotors, LS Series motors can provide the same torque that brushless BLDC motors deliver, combined with zero cogging. Gimbal manufacturers have an inherent need for high torque to move quickly and accurately in azimuth and elevation in most cases, and to stabilize the housing for high applied forces caused by drag from the aircraft's speed and the gimbal's preceding position.
Ultimately, torque motors are the perfect form factor for gimbals with their round shape, direct drive mounting capability, and empty center. Motor kits offer a very large through bore, typically 65% or more of the outer diameter (OD) of the device, due to efficient mechanical design and optimized components. This large through-hole not only saves weight, but also provides valuable space to accommodate electronics, through-hole wiring or other aspects of the payload.
LS Series slotless motor kits are perfect for gimbal applications, airborne or otherwise. Even ground-based systems, vehicle-mounted turrets, spacecraft imaging systems and pan-tilt-zoom (PTV) security systems can benefit.
Features summary of LSI-Series Motors:
- cogging-free for smooth and precise motion
- low weight
- large through hole
- high peak torque and highest torque density
- suitable for low speed operation e.g. in universal joints, robotics, beam control, optical platforms
- low total harmonic distortion (<1% in back EMF)
- precise phase balance with sinusoidal drive, resulting in: extremely low torque ripple
- frameless motor kits for deep integration












 or linear amplifier")

